사이트맵
사이트맵


ICT뉴스 
| [무인이동체 10개년 로드맵 발표] 2024년, 드론타고 출퇴근 한다 | |||
| 작성일자 | 2017.12.08 | 조회수 | 10926 |
|---|---|---|---|
| 첨부파일 | 없음 | ||
|
[무인이동체 10개년 로드맵 발표] 2024년, 드론타고 출퇴근 한다
R&D비용 5,500억 투입
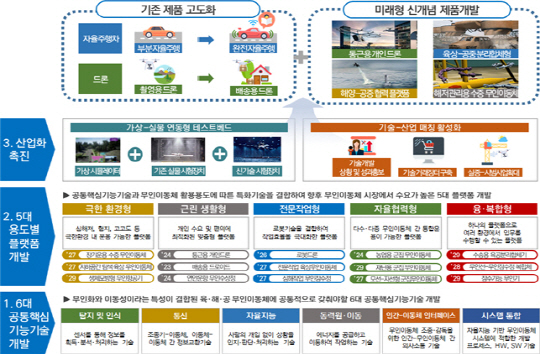
[서울경제 고광본 기자] 정부가 오는 2024년에 도심에서 출퇴근용으로 사용할 수 있는 드론을 개발하기로 했다. 또 자율차와 드론 겸용을 비롯해 무인선박·잠수정 겸용 무인이동체도 등장한다.6대 핵심기술을 보면 ‘탐지·인식’은 정밀 항법·항행기술 등을 개발하고 탐지·회피 센서 등을 발전시키고, ‘통신’은 광통신 개발과 보안성 확충 등에 나선다. 또 ‘자율지능’은 무인이동체 상황인식 기술 개발과 장기적인 이동체 간 협력 기술을 개발하는 내용이 골자다. ‘동력원·이동’은 배터리(리튬-금속, 리튬-황, 전고체 이차전지)·엔진·연료전지·태양전지 등을 개발하고, ‘인간-이동체 인터페이스’는 AR·VR 기반의 원격 운용 체계와 음성·제스처 등 조종 방식 개발, 장기적으로 뇌파·시선 조종 알고리즘 개발에 나선다. ‘시스템 통합’은 무인이동체에 자율지능 등을 적용·검증할 수 있는 개발체계 연구와 무인이동체 공통 SW 아키텍처를 개발하는 것이다. ‘전문작업형’으로는 로봇드론(2026년), 전문작업 육상무인이동체(2027년), 심해작업 무인잠수정(2027년), ‘자율협력형’으로는 농업용 군집 무인이동체(2024년), 모선-자선형 군집무인이동체(2027년), 재난용 군집 무인이동체(2029년)다. ‘융·복합형’으로는 무인선-무인잠수정 복합체(2028년), 수송용 육공분리합체기(2029년), 잠수가능 무인기(2029년)다. 이진규 과기정통부 1차관은 “무인이동체는 혁신성장을 가장 먼저 가시화할 분야”라며 “산·학·연·관이 힘으로 합쳐 무인이동체 핵심기술을 개발·공급할 것”이라고 밝혔다.
무인이동체 기술혁신과 성장 10개년 로드맵 개요. |
|||